Iterační metody řešení soustav lineárních rovnic, hledání vlastních čísel
Contents
4. Iterační metody řešení soustav lineárních rovnic, hledání vlastních čísel#
Naimportujeme si knihovny potřebné pro následující příklady:
import numpy as np
import matplotlib.pyplot as plt
4.1. Iterační metody:#
Řešení rovnice \(\mathbb{A}\mathbf{x}=\mathbf{b}\) odhadneme vektorem \(\mathbf{x}^{0}\)
Následné iterace \(\mathbf{x}^{(k+1)}=\mathbb{B}_{k}\mathbf{x}^{(k)}+\mathbf{c}_{k}\) upřesňují náš počáteční odhad
4.1.1. Jacobiho metoda#
Řešíme rovnici \(\mathbb{A}\mathbf{x}=\mathbf{b}\)
Předpokládáme, že matice \(\mathbb{A}\) má nenulové diagonální prvky \(a_{ii}\neq 0\)
Matici \(\mathbb{A}\) lze zapsat ve tvaru:
kde \(\mathbb{D}\) je diagonální, \(\mathbb{L}\) je dolní trojúhelníková a \(\mathbb{U}\) je horní trojúhelníková matice (\(\mathbb{L}\) a \(\mathbb{U}\) mají nulovou diagonálu)
Jacobiho metoda (odvození): $\( \mathbf{x}^{(k+1)} = -\mathbb{D}^{-1}\left( \mathbb{L}+\mathbb{U}\right)\mathbf{x}^{(k)}+ \mathbb{D}^{-1}\mathbf{b} \)$
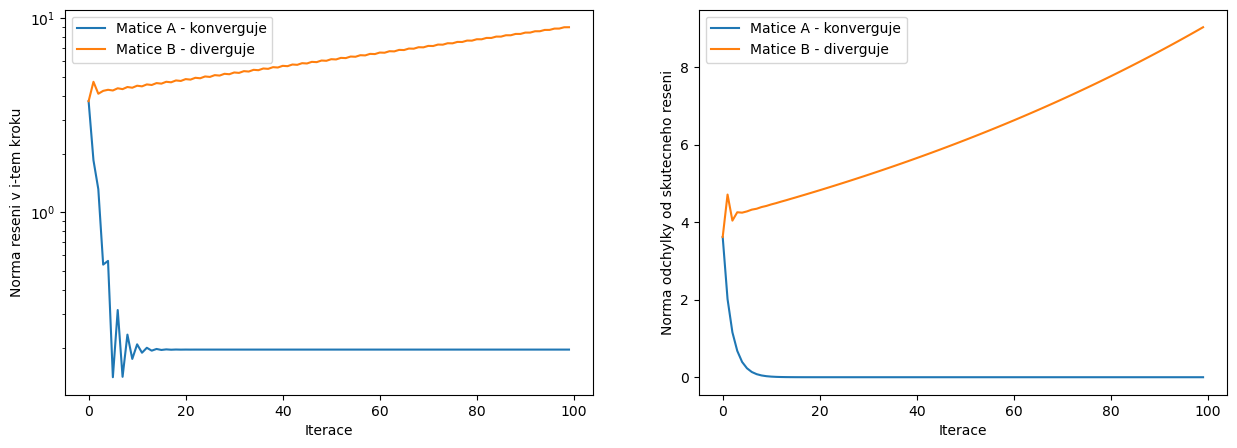
Metoda konverguje, pokud je matice \(\mathbb{A}\) diagonálně dominantní, tj. \(\vert a_{ii}\rvert > \sum_{j=1,j\neq i}^{n}\vert a_{ij} \rvert\)
#
# Jacobiho metoda
# Zvolme dve matice, A bude konvergovat, B nebude konvergovat
# matice A je diagonalne dominantni
A = np.array([
[5, 1, 1],
[2, 7, 3],
[2, 3, 8]
])
# matice B neni diagonalne dominantni
B = np.array([
[5, 10, 1],
[2, 7, 3],
[2, 3, 8]
])
# zvolime pravou stranu (radkovy vektor prevedeme na sloupcovy pomoci transpozice .T)
b = np.array([[1, 1, 1]]).T
# nastavime uvodni odhad reseni (radkovy vektor prevedeme na sloupcovy pomoci transpozice .T)
xUvodni = np.array([[1, 2, 3]]).T
# zvolime pocet iteraci, po ktere budeme chtit sledovat jak se reseni chova
pocet_iteraci = 100
# spocteme si reseni matic Ax=b a Bx=b primou metodou, pro kontrolu postupu
reseniA = np.linalg.solve(A, b)
reseniB = np.linalg.solve(B, b)
# v prubehu iteraci si budeme pamatovat velikost vektoru reseni v i-tem kroku,
# dale "vzdalenost" reseni v i-tem kroku od skutecneho reseni spocitaneho primou metodou
# budeme iterovat matici A
x = xUvodni
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
velikostReseniA = np.array([])
velikostChybyA = np.array([])
for i in range(pocet_iteraci):
velikostReseniA = np.append(velikostReseniA, np.linalg.norm(x)) # jen pro zobrazovani
velikostChybyA = np.append(velikostChybyA,np.linalg.norm(x-reseniA)) # jen pro zobrazovani
# DOPLNTE #
F = -np.dot(np.linalg.inv(D),(L+U))
G = np.linalg.inv(D)
x = np.dot(F,x) + np.dot(G,b) # toto je vlastni vypocet
# DOPLNTE #
# budeme iterovat matici B
x = xUvodni
L = np.tril(B,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(B,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = B-L-U
velikostReseniB = np.array([])
velikostChybyB = np.array([])
for i in range(pocet_iteraci):
velikostReseniB = np.append(velikostReseniB, np.linalg.norm(x)) # jen pro zobrazovani
velikostChybyB = np.append(velikostChybyB,np.linalg.norm(x-reseniB)) # jen pro zobrazovani
# DOPLNTE #
F = -np.dot(np.linalg.inv(D),(L+U))
G = np.linalg.inv(D)
x = np.dot(F,x) + np.dot(G,b) # vlastni vypocet
# DOPLNTE #
# zobrazime si, jak to vypada
fig, ax = plt.subplots(1,2,figsize=(15,5))
ax[0].plot(range(pocet_iteraci),velikostReseniA,label='Matice A - konverguje')
ax[0].plot(range(pocet_iteraci),velikostReseniB,label='Matice B - diverguje')
ax[0].set_yscale('log')
ax[0].set_ylabel('Norma reseni v i-tem kroku')
ax[0].set_xlabel('Iterace')
ax[0].legend()
ax[1].plot(range(pocet_iteraci),velikostChybyA,label='Matice A - konverguje')
ax[1].plot(range(pocet_iteraci),velikostChybyB,label='Matice B - diverguje')
ax[1].set_yscale('linear')
ax[1].set_ylabel('Norma odchylky od skutecneho reseni')
ax[1].set_xlabel('Iterace')
ax[1].legend()
<matplotlib.legend.Legend at 0x7380970986d0>
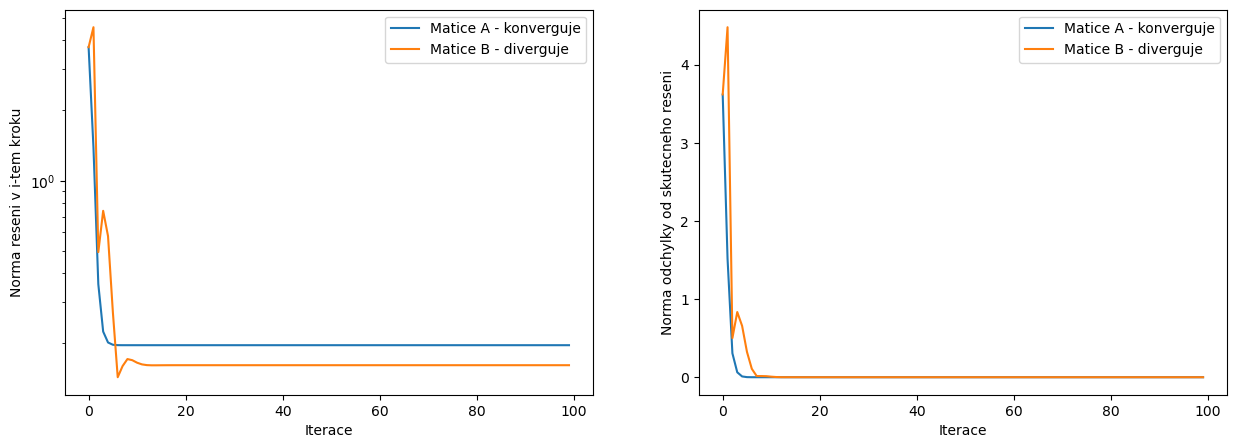
4.1.2. Gauss-Seidelova metoda#
Gauss-Seidelova metoda: $\( \mathbf{x}^{(k+1)} = -\left(\mathbb{D}+\mathbb{L} \right)^{-1}\mathbb{U}\mathbf{x}^{(k)}+\left(\mathbb{D}+\mathbb{L} \right)^{-1}\mathbf{b} \)$
Při výpočtu složek vektoru \(\mathbf{x}_{i}^{(k+1)}\) používá již dříve vypočtené složky \((k+1).\) iterace
Metoda konverguje, pokud je matice \(\mathbb{A}\) diagonálně dominantní nebo symetrická pozitivně definitní (pozitivně definitní matice má vždy kladná vlastní čísla)
#
# Gauss-Seidelova metoda
# Zvolme dve matice, A bude konvergovat, B nebude konvergovat
# matice A je diagonalne dominantni
A = np.array([
[5, 1, 1],
[2, 7, 3],
[2, 3, 8]
])
# matice B neni diagonalne dominantni
B = np.array([
[5, 10, 1],
[2, 7, 3],
[2, 3, 8]
])
# zvolime pravou stranu (radkovy vektor prevedeme na sloupcovy pomoci transpozice .T)
b = np.array([[1, 1, 1]]).T
# nastavime uvodni odhad reseni (radkovy vektor prevedeme na sloupcovy pomoci transpozice .T)
xUvodni = np.array([[1, 2, 3]]).T
# zvolime pocet iteraci, po ktere budeme chtit sledovat jak se reseni chova
pocet_iteraci = 100
# spocteme si reseni matic Ax=b a Bx=b primou metodou, pro kontrolu postupu
reseniA = np.linalg.solve(A, b)
reseniB = np.linalg.solve(B, b)
# v prubehu iteraci si budeme pamatovat velikost vektoru reseni v i-tem kroku,
# dale "vzdalenost" reseni v i-tem kroku od skutecneho reseni spocitaneho primou metodou
# budeme iterovat matici A
x = xUvodni
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
velikostReseniA = np.array([])
velikostChybyA = np.array([])
for i in range(pocet_iteraci):
velikostReseniA = np.append(velikostReseniA, np.linalg.norm(x)) # jen pro zobrazovani
velikostChybyA = np.append(velikostChybyA,np.linalg.norm(x-reseniA)) # jen pro zobrazovani
# DOPLNTE
F = -np.dot(np.linalg.inv(D+L),U)
G = np.linalg.inv(D+L)
x = np.dot(F,x) + np.dot(G,b) # toto je vlastni vypocet
# DOPLNTE
# budeme iterovat matici B
x = xUvodni
L = np.tril(B,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(B,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = B-L-U
velikostReseniB = np.array([])
velikostChybyB = np.array([])
for i in range(pocet_iteraci):
velikostReseniB = np.append(velikostReseniB, np.linalg.norm(x)) # jen pro zobrazovani
velikostChybyB = np.append(velikostChybyB,np.linalg.norm(x-reseniB)) # jen pro zobrazovani
# DOPLNTE
F = -np.dot(np.linalg.inv(D+L),U)
G = np.linalg.inv(D+L)
x = np.dot(F,x) + np.dot(G,b) # vlastni vypocet
# DOPLNTE
# zobrazime si, jak to vypada
fig, ax = plt.subplots(1,2,figsize=(15,5))
ax[0].plot(range(pocet_iteraci),velikostReseniA,label='Matice A - konverguje')
ax[0].plot(range(pocet_iteraci),velikostReseniB,label='Matice B - diverguje')
ax[0].set_yscale('log')
ax[0].set_ylabel('Norma reseni v i-tem kroku')
ax[0].set_xlabel('Iterace')
ax[0].legend()
ax[1].plot(range(pocet_iteraci),velikostChybyA,label='Matice A - konverguje')
ax[1].plot(range(pocet_iteraci),velikostChybyB,label='Matice B - diverguje')
ax[1].set_yscale('linear')
ax[1].set_ylabel('Norma odchylky od skutecneho reseni')
ax[1].set_xlabel('Iterace')
ax[1].legend()
<matplotlib.legend.Legend at 0x7380968ffca0>
4.1.3. Superrelaxační metoda#
Gauss-Seidelova metoda může konvergovat pomalu
K urychlení iteračního procesu bývá využívána superrelaxační metoda: $\( x_{i}^{(k+1)}=x_{i}^{(k)}+\omega\Delta x_{i}^{(k)} \)$
rozdíl mezi iteracemi při Gauss-Seidelově metodě \(\Delta x_{i}^{(k)}=x_{i}^{(k+1)}-x_{i}^{(k)}\)
relaxační faktor \(\omega \in (0,2)\)
optimální hodnota relaxačního faktoru \(\omega_{\mathrm{opt}}=\dfrac{2}{1+\sqrt{1-\rho^{2}\left[-\left(\mathbb{D}+\mathbb{L}\right)^{-1}\mathbb{U}\right]}}\)
\(\rho(\mathbb{A})\) představuje spektrální poloměr matice \(\mathbb{A}\): \(\rho(\mathbb{A}) = \mathrm{max}(\lvert \lambda_{1} \rvert, \lvert \lambda_{2} \rvert, ..., \lvert \lambda_{n} \rvert)\)
4.1.4. Prostá iterace#
Prostá iterace: $\( \mathbf{x}^{(k+1)}=\left(\mathbb{I}-\mathbb{A} \right)\mathbf{x}^{(k)} + \mathbb{I}\mathbf{b} \)$
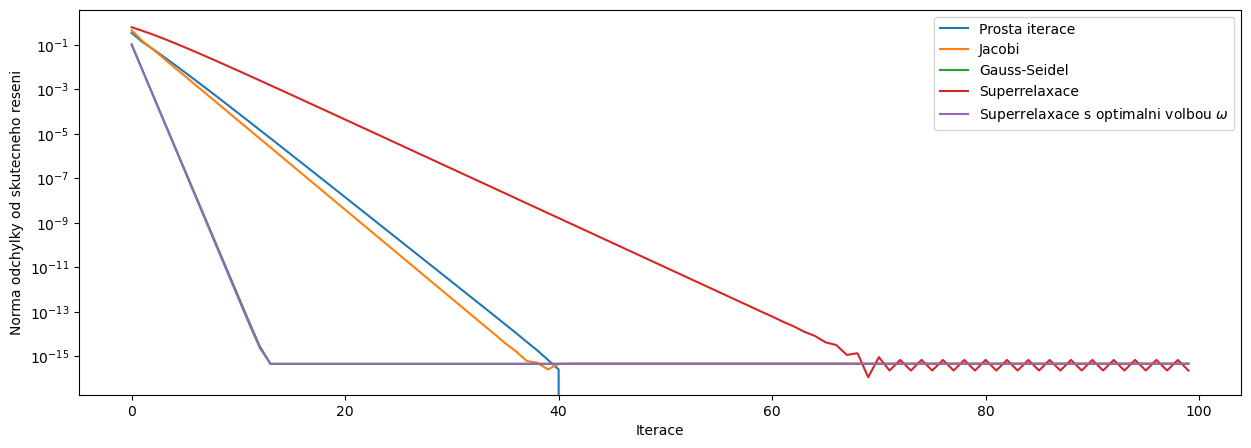
4.1.5. Porovnání prosté iterace, Jacobiho, Gauss-Seidelovy a superrelaxační metody#
#
# zvolme pocet iteraci
pocet_iteraci = 100
# zvolime nahodnou matici, uvidime jeslti bude konvergovat, ke ktere
# pricteme jednotkovou diagonalni, zvysime tak pravdepodobnost ze vse bude konvergovat
#A = rand(3)/2+eye(3)/2
A = np.random.rand(3,3)/2+np.eye(3)/2
# zvolime pozadovane reseni, ze ktereho napocitame pravou stranu
origReseni = np.array([[1,1,1]]).T
# najdeme pravou stranu
b = np.dot(A,origReseni)
# zvolime nahodny uvodni odhad ze ktereho budeme iterovat
uvodniOdhad = np.random.rand(3,1)
# zvolime omega pro superrelaxaci, nebude optimalni, nevadi
omega = 1.6
# PROSTA ITERACE
# spocteme si matici B jako I-A
B = np.eye(A.shape[0])-A
x = uvodniOdhad
vzdProstaIterace = np.array([])
for i in range(pocet_iteraci):
# DOPLNTE
F = B
G = np.eye(F.shape[0])
x = np.dot(F,x) + np.dot(G,b)
# DOPLNTE
vzdProstaIterace = np.append(vzdProstaIterace,np.linalg.norm(x-origReseni))
# JACOBI
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
F = -np.dot(np.linalg.inv(D),(L+U))
G = np.linalg.inv(D)
x = uvodniOdhad
vzdJacobi = np.array([])
for i in range(pocet_iteraci):
x = np.dot(F,x) + np.dot(G,b) # toto je vlastni vypocet
vzdJacobi = np.append(vzdJacobi,np.linalg.norm(x-origReseni))
# GAUSS-SEIDEL
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
F = -np.dot(np.linalg.inv(D+L),U)
G = np.linalg.inv(D+L)
x = uvodniOdhad
vzdGaussSeidel = np.array([])
for i in range(pocet_iteraci):
x = np.dot(F,x) + np.dot(G,b) # toto je vlastni vypocet
vzdGaussSeidel = np.append(vzdGaussSeidel,np.linalg.norm(x-origReseni))
# SUPERRELAXACE + GAUS-SEIDEL
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
# toto je ze seidela
F = -np.dot(np.linalg.inv(D+L),U)
G = np.linalg.inv(D+L)
x = uvodniOdhad
vzdSuperRelaxace = np.array([])
for i in range(pocet_iteraci):
# DOPLNTE
xkp1 = np.dot(F,x) + np.dot(G,b)
x = x + omega * (xkp1 - x)
# DOPLNTE
vzdSuperRelaxace = np.append(vzdSuperRelaxace,np.linalg.norm(x-origReseni))
# SUPERRELAXACE s opt. omega
L = np.tril(A,-1) # vytvori dolni trojuhlenikovou matici (s nulovou diagonalou)
U = np.triu(A,1) # vytvori horni trojuhlenikovou matici (s nulovou diagonalou)
D = A - L - U
# toto je z Gaiss-Seidela
F = -np.dot(np.linalg.inv(D+L),U)
G = np.linalg.inv(D+L)
# spektralni polomer matice F (maximum z mnoziny vlastnich cisel matice F)
r = np.max(np.abs(np.linalg.eig(F)[0]))
omega = 2/( 1+np.sqrt(np.abs(1-r**2))) # optimalni omega
x = uvodniOdhad
vzdSuperRelaxaceOmega = np.array([])
for i in range(pocet_iteraci):
# DOPLNTE
xkp1 = np.dot(F,x) + np.dot(G,b)
x = omega * (xkp1 - x) + x
# DOPLNTE
vzdSuperRelaxaceOmega = np.append(vzdSuperRelaxaceOmega,np.linalg.norm(x-origReseni))
# ZOBRAZIME
# zobrazime si jak to vypada
fig, ax = plt.subplots(figsize=(15,5))
ax.plot(range(pocet_iteraci),vzdProstaIterace,label='Prosta iterace')
ax.plot(range(pocet_iteraci),vzdJacobi,label='Jacobi')
ax.plot(range(pocet_iteraci),vzdGaussSeidel,label='Gauss-Seidel')
ax.plot(range(pocet_iteraci),vzdSuperRelaxace,label='Superrelaxace')
ax.plot(range(pocet_iteraci),vzdSuperRelaxaceOmega,label=r'Superrelaxace s optimalni volbou $\omega$')
ax.set_yscale('log')
ax.set_ylabel('Norma odchylky od skutecneho reseni')
ax.set_xlabel('Iterace')
ax.legend()
<matplotlib.legend.Legend at 0x738096c97d30>
4.2. Hledání vlastních čísel a vektorů matice#
Nechť pro číslo \(\lambda\) existuje vektor \(\mathbf{x}\neq\mathbf{0} \) takový, že \(\mathbb{A}\mathbf{x}=\lambda\mathbf{x}\). Pak:
\(\lambda\) je vlastní číslo matice \(\mathbb{A}\)
\(\mathbf{x}\) je vlastní vektor matice \(\mathbb{A}\)
Motivace: vlastní čísla a vlastní vektory souvisí např. s operátory v kvantové fyzice, rezonanční frekvencí, … atd.
Typy úloh:
Úplný problém vlastních čísel - hledání všech vlastních čísel matice a případně i příslušných vlastních vektorů
Částečný problém vlastních čísel - hledání jednoho nebo několika vlastních čísel
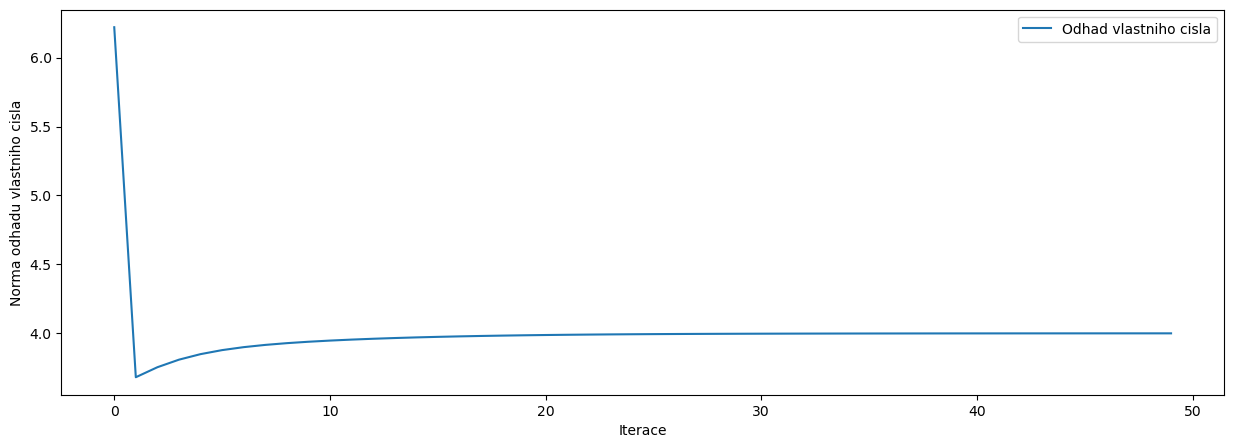
Příklad na částečný problém vlastních čísel: hledám vlastní číslo matice \(\mathbb{A}\), které je největší v absolutní hodnotě. Postup:
Zvolíme libovolné \(\mathbf{v}^{(0)}\) jako počáteční odhad vlastního vektoru
Iterujeme $\( \lambda^{(k+1)}=\lVert \mathbb{A}\mathbf{v}^{(k)} \rVert \)$
# vypocet nejvetsiho vlastniho cisla
# pouzijeme velmi jednoduchou diagonalni matici 3x3, u ktere zname vlastni cisla,
# ale muzete si vyzkouset i jine matice
#
matice = np.array([
[4, 0, 0],
[0, 3.7, 0],
[0, 0, 3]
])
#matice = np.array([
# [4, 0, -10],
# [0, 3.7, -8.8],
# [-7.85, 2.6, 3]
# ])
# do vlastniho vektoru v ulozime uvodni odhad
v = np.array([[1,1,1]]).T
# budeme opakovat 50, v prubehu vypoctu si budeme pamatovat normu matice*v,
# tedy odhad vlastniho cisla (vime ze se ma blizit ctyrce)
pocet_iteraci = 50
odhadVlastnihoCisla = np.array([])
for i in range(pocet_iteraci):
odhadVlastnihoCisla = np.append(odhadVlastnihoCisla,np.linalg.norm(np.dot(matice,v)))
# DOPLNTE
v = np.dot(matice,v) / np.linalg.norm(np.dot(matice,v))
# DOPLNTE
# odhad nejvetsiho vlastniho cisla je
lambda_odhad = np.linalg.norm(np.dot(matice,v))
print('Odhad nejvetsiho vlastniho cisla = ',lambda_odhad)
# odhad vlastniho vektoru je
print('Odhad prislusneho vlastniho vektoru = ',v)
# zobrazime si jak jsme se k vlastnimu cislu blizili
fig, ax = plt.subplots(figsize=(15,5))
ax.plot(range(pocet_iteraci),odhadVlastnihoCisla,label='Odhad vlastniho cisla')
ax.set_ylabel('Norma odhadu vlastniho cisla')
ax.set_xlabel('Iterace')
ax.legend()
# kontrola
#vl_cislo_reseni, vl_vektor_reseni = np.linalg.eig(matice)
#print(np.max(vl_cislo_reseni))
#print(vl_vektor_reseni)
Odhad nejvetsiho vlastniho cisla = 3.9998812802104133
Odhad prislusneho vlastniho vektoru = [[9.99794407e-01]
[2.02767030e-02]
[5.66205224e-07]]
<matplotlib.legend.Legend at 0x7380966fe4f0>