Aproximace funkcí II, třídění
Contents
6. Aproximace funkcí II, třídění#
Naimportujeme si knihovny potřebné pro následující příklady:
import numpy as np
import matplotlib.pyplot as plt
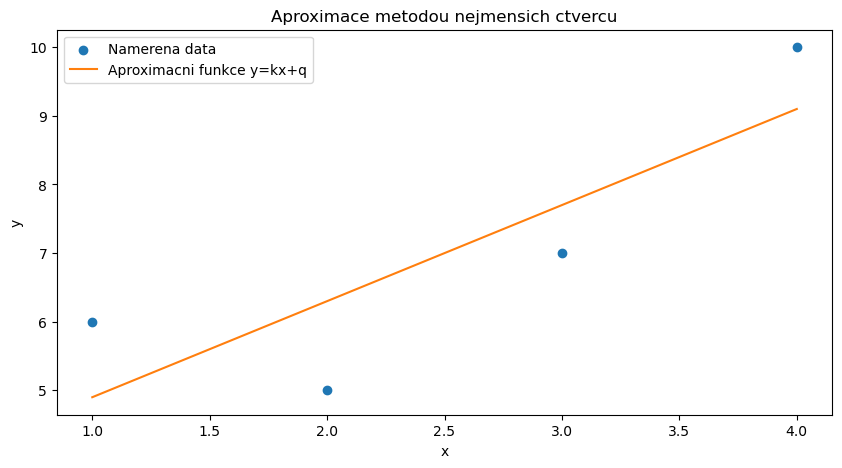
6.1. Metoda nejmenších čtverců#
Aproximační funkce neprochází zadanými body (např. při aproximaci výsledků měření s nezanedbatelnými chybami)
Naměřené hodnoty proložíme takovou aproximační funkcí \(f(x)\), která minimalizujeme funkcionál $\( \tilde{S} = \sqrt{\sum_{i=1}^{n}w_{i}\left[y_{i} - f(x_{i})\right]^{2}} \)$
Aproximační funkce může být např.
Lineární (odvození uděláme v rámci cvičení)
Kvadratická (odvození)
John von Neumann: “With four parameters I can fit an elephant, and with five I can make him wiggle his trunk.” [zdroj]
Problémy statistické regrese - Anscombe’s quartet
{kind=link}
#
x = np.array([1, 2, 3, 4])
y = np.array([6, 5, 7, 10])
n = x.size
# predpokladame linearni aproximacni polynom y = kx + q
# minimum fukncionalu S najdeme pomoci derivace
# to vede na reseni soustavy lin. rovnic
# ze soustavy lin. rovnic vypocitame koeficienty k, q
# np.sum() = suma
A = np.array([
[np.sum(x*x), np.sum(x)],
[np.sum(x), n]
])
b = np.array([np.sum(x*y), np.sum(y)])
# ziskame koeficienty
reseni = np.linalg.solve(A,b)
k = reseni[0]
q = reseni[1]
print('Parametr k: ',k)
print('Parametr q: ',q)
fig, ax = plt.subplots(figsize=(10,5))
ax.scatter(x,y,label='Namerena data')
ax.plot(x,k*x+q, color='C1', label='Aproximacni funkce y=kx+q')
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.legend()
ax.set_title('Aproximace metodou nejmensich ctvercu')
Parametr k: 1.3999999999999995
Parametr q: 3.5000000000000018
Text(0.5, 1.0, 'Aproximace metodou nejmensich ctvercu')
6.2. Řazení#
6.2.1. Řazení vkládáním (insertion sort)#
Postupně procházíme prvky a každý další nesetříděný prvek zařadíme na správné místo do již setříděné posloupnosti.
Dokáže řadit data tak, jak přicházejí na vstup.
# kod
def insertion_sort(arr):
# prochazim pole od 1 do n -1
for i in range(1, arr.size): # i=1,2,3,4
klic = arr[i]
j = i-1
while j >= 0 and arr[j] > klic : #prvky arr[0..i-1], ktere jsou vetsi nez klic
arr[j + 1] = arr[j] # posunu doprava
j -= 1
arr[j + 1] = klic
arr = np.array([12, 11, 13, 5, 6])
print('Nesetridene pole:')
print(arr)
insertion_sort(arr)
print('Setridene pole:')
print(arr)
Nesetridene pole:
[12 11 13 5 6]
Setridene pole:
[ 5 6 11 12 13]
6.2.2. Řazení výběrem (selection sort)#
Postupně procházíme prvky a hledáme minimum z neseřazené části.
Nalezené minimum zařadíme na začátek seřazené části.
# kod
def selection_sort(arr):
# prochazim pole od 0 do n - 1
for i in range(arr.size):
klic_index = i # index klice
for j in range (i+1,arr.size): # projdeme pole od i+1. prvku do konce
if arr[klic_index] > arr[j]: # pokud je zkoumany j-ty prvek mensi
klic_index = j # ulozime si jeho index
arr[klic_index], arr[i] = arr[i], arr[klic_index] # prohodime aktualni a nalezeny prvek
# protoze jsme prosli cely zbytek pole, je ted na i-tem miste i-ty
# nejmensi prvek, a muzeme pokracovat tridenim zbytku pole
arr1 = np.array([8, 14, 11, 1, 32])
print('Nesetridene pole:')
print(arr1)
selection_sort(arr1)
print('Setridene pole:')
print(arr1)
Nesetridene pole:
[ 8 14 11 1 32]
Setridene pole:
[ 1 8 11 14 32]
6.2.3. Quick sort (rychlé řazení)#
# kod
def partition(array, low, high):
# pivot bude prvek na konci pole
pivot = array[high]
# ukazatel na vetsi prvek
i = low - 1
for j in range(low, high): # prochazim celym polem
if array[j] <= pivot: # porovnavam kazdy prvek s pivotem
i = i + 1 # pokud je prvek mensi nez pivot, posuneme ukazatel i
# prohozeni prvku i a j
(array[i], array[j]) = (array[j], array[i])
# prohozeni pivota s vetsim prvkem
(array[i + 1], array[high]) = (array[high], array[i + 1])
return i + 1
def quick_sort(array, low, high):
if low < high:
# najdu pivot tak, ze prvky mensi nez pivot jsou vlevo, prvky vetsi nez pivot jsou vpravo
pi = partition(array, low, high)
# rekurze pro prvky nalevo od pivotu
quick_sort(array, low, pi - 1)
# rekurze pro provky napravo od pivotu
quick_sort(array, pi + 1, high)
arr3 = np.array([8, 7, 2, 1, 0, 9, 6])
print('Nesetridene pole:')
print(arr3)
delka = arr3.size
quick_sort(arr3, 0, delka - 1)
print('Setridene pole:')
print(arr3)
Nesetridene pole:
[8 7 2 1 0 9 6]
Setridene pole:
[0 1 2 6 7 8 9]
6.2.4. Heapsort (řazení haldou)#
# kod
# vytvoreni haldy
def heapify(arr, n, i):
largest = i
l = 2 * i + 1 # levy = 2*i + 1
r = 2 * i + 2 # pravy = 2*i + 2
# je levy potomek vetsi nez rodic?
if l < n and arr[largest] < arr[l]:
largest = l
# je pravy potomek vetsi nez rodic?
if r < n and arr[largest] < arr[r]:
largest = r
# zmena rodice
if largest != i:
arr[i], arr[largest] = arr[largest], arr[i] # prohozeni
heapify(arr, n, largest)
# razeni
def heap_sort(arr):
n = len(arr)
# vytvoreni haldy
for i in range(n//2 - 1, -1, -1):
heapify(arr, n, i)
# smazani jednolitych elemetu
for i in range(n-1, 0, -1):
arr[i], arr[0] = arr[0], arr[i] # prohozeni
heapify(arr, i, 0)
arr4 = np.array([12, 5, 13, 11, 6, 7])
print('Nesetridene pole:')
print(arr4)
heap_sort(arr4)
print('Setridene pole:')
print(arr4)
Nesetridene pole:
[12 5 13 11 6 7]
Setridene pole:
[ 5 6 7 11 12 13]
Zdroj a více informací ke třídícím algoritmům zde.