Obyčejné diferenciální rovnice (ODR)
Contents
10. Obyčejné diferenciální rovnice (ODR)#
Naimportujeme si knihovny potřebné pro následující příklady:
import numpy as np
import matplotlib.pyplot as plt
Vektorové vyjádření systému rovnic $\( \dfrac{\mathrm{d}\vec y}{\mathrm{d}x}=\vec f (x,\vec y)\)$
ODR \(N\)-tého řádu převádíme na soustavu \(N\) diferenciálních rovnic 1. řádu
Potřebujeme \(N\) počátečních podmínek
Řešení se liší v závislosti na počátečních podmínkách:
Počáteční problém: všechny podmínky jsou zadány v jednom bodě
Okrajový problém: všechny podmínky nejsou zadány v jednom bodě
10.1. Runge-Kuttovy metody pro řešení počátečního problému#
10.1.1. Eulerova metoda#
Z Taylorova rozvoje známe směrnici tečny
V každém bodě \(x_{1},x_{2}\dots x_{n}\) aproximujeme funkci její tečnou $\( y(x+h)\approx y(x)+hf\left( x,y(x)\right)\)$
Metodu lze zpřesnit zmenšením vzdálenosti \(h=x_{k+1}-x_{k}\)
10.1.2. Metoda středního bodu#
Přesnější vyjádření směrnice tečny:
Provedeme poloviční krok \(h/2\) pomocí Eulerovy metody
V tomto bodě vypočítáme směrnici tečny
Tuto směrnici použijeme k provedení celého kroku z bodu \(x\) do \(x+h\) $\( y(x+h)\approx y(x)+hf\left[ x+\dfrac{h}{2},y(x)+\dfrac{h}{2}f\left( x,y(x)\right) \right] \)$
10.1.3. Heunova metoda#
Opět zpřesňujeme vyjádření směrnice tečny:
Směrnici tečny v bodě \(x+h\) určíme pomocí Eulerovy metody
Uděláme průměr ze směrnic v bodech \(x\) a \(x+h\)
Tuto směrnici použijeme k provedení celého kroku z bodu \(x\) do \(x+h\) $\( y(x+h)\approx y(x)+\dfrac{h}{2}\lbrace f \left( x,y(x) \right) + f\left[x+h,y(x)+hf(x,y(x))\right]\rbrace \)$
10.1.4. Runge-Kuttova metoda 4. řádu#
Využívá postupné zpřesňování hodnot derivace v bodech mezi \(x\) a \(x+h\)
Postup výpočtu: $\( k_{1}=f(x_{n},y_{n})\)\( \)\( k_{2}=f(x_{n}+\dfrac{h}{2},y_{n}+\dfrac{h}{2}k_{1})\)\( \)\( k_{3}=f(x_{n}+\dfrac{h}{2},y_{n}+\dfrac{h}{2}k_{2})\)\( \)\( k_{4}=f(x_{n}+h,y_{n}+hk_{3})\)\( \)\( y_{n+1}\approx y_{n}+\dfrac{h}{6}\left(k_{1}+2k_{2}+2k_{3}+k_{4} \right)\)$
Pro Runge-Kuttovy metody obecně platí:
Výhody: robustní metoda, funguje témeř vždy
Nevýhody: na jeden krok je potřeba funkci několikrát vyčíslit, nehodí se pro řešení rovnic se silným tlumením (stiff rovnice)
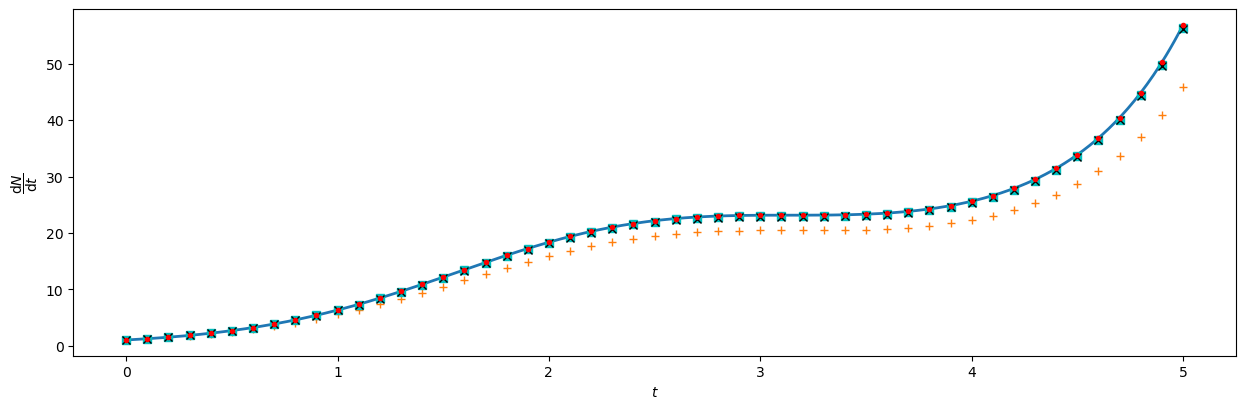
# kod
# pocatecni podminky
uH = 1 # Heunova metoda
uSB = 1 # Metoda stredniho bodu
uE = 1 # Eulerova metoda
uRK = 1 # Runge-Kutta
# konecny cas
T = 5
# casove kroky
tA = np.linspace(0,T,num=500)
## resime tuto rovnici f(x,y(x))=dy(x)/dx:
def f(x,y):
return (1 + np.cos(x)) * y
# presne reseni
exact = np.exp(tA + np.sin(tA))
# delka kroku
h = 0.1
##
## stiff
#def f(x,y):
# return -15*y
#
## presne reseni
#exact = np.exp(-15*tA )
#
#
# delka kroku (0.1 - 0.2)
#h=0.2
##
fig, ax = plt.subplots(figsize=(15,4.5))
ax.plot(tA,exact,linewidth=2) # zobrazime presne reseni
t = 0
while t<T:
# Eulerova metoda
ax.plot(t,uE, marker="+", color='C1')
# spocteme novou hodnotu promenne uE
uE = uE+h*f(t,uE)
# Metoda stredniho bodu
ax.plot(t,uSB, marker="s", color='c')
# spocteme novou hodnotu promenne uSB
uSB = uSB+h*f(t+h/2,uSB+h/2*f(t,uSB))
# Heunova metoda
ax.plot(t,uH, marker="x", color='k')
# spocteme novou hodnotu promenne uH
uH = uH+h/2*(f(t,uH)+f(t+h,uH+h*f(t,uH)))
# Runge-Kutta 4. rad
ax.plot(t,uRK, marker=".", color='r')
# spocteme novou hodnotu promenne uRK
k1 = f(t,uRK)
k2 = f(t+h/2,uRK+h/2*k1)
k3 = f(t+h/2,uRK+h/2*k2)
k4 = f(t+h,uRK+h*k3)
uRK = uRK + h/6*(k1+2*k2+2*k3+k4)
t = t + h
ax.set_ylabel(r'$\dfrac{\mathrm{d}N}{\mathrm{d}t}$')
ax.set_xlabel(r'$t$')
#ax.set_xlim((4.5,5))
#ax.set_ylim((0,60))
# stiff rovnice
#ax.set_ylim((-1,1))
Text(0.5, 0, '$t$')
10.2. Stiff rovnice (rovnice se silným tlumením)#
Takové rovnice, které v sobě obsahují útlum s charakteristickým časem \(\tau \ll \) jiný charakteristický čas úlohy
Pro řešení je potřeba zvolit délku kroku \(h \leq \tau\)
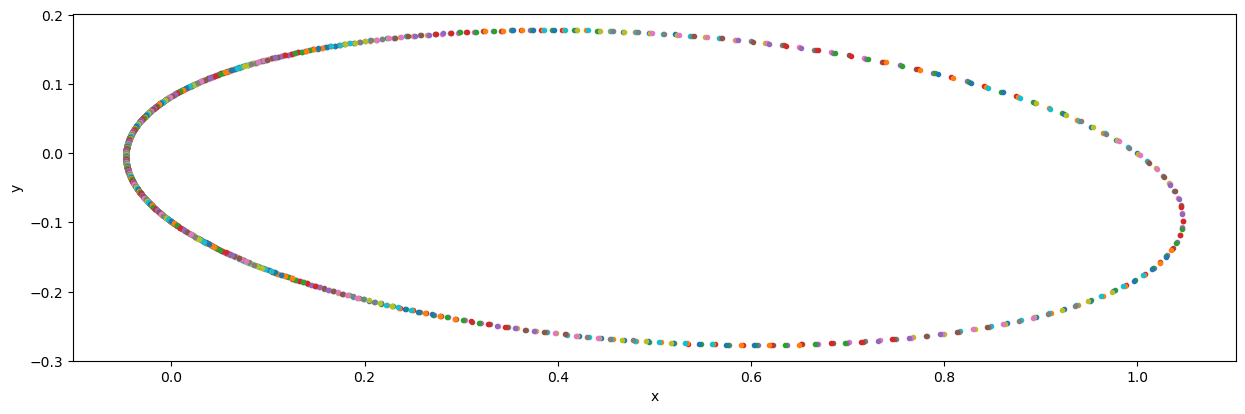
10.3. Řešení soustav diferenciálních rovnic#
Zadnou úlohu převedeme na soustavu \(N\) diferenciálních rovnic 1. řádu
# kod
# metodou Runge-Kuta ctvrteho radu budeme resit soustavu dvou rovnic druheho radu (problem dvou teles)
# konecny cas
T = 20
# pocatecni podminky
# array([x, dx/dt, y, dy/dt])
u = np.array([1, -0.3, 0, 0.3])
def f(u):
w = np.zeros(4)
w[0] = u[1]
w[1] = -u[0]/(u[0]**2+u[2]**2)**(3/2)
w[2] = u[3]
w[3] = -u[2]/(u[0]**2+u[2]**2)**(3/2)
return w
fig, ax = plt.subplots(figsize=(15,4.5))
t = 0
while t<T:
r = (u[0]**2+u[2]**2)**(1/2)
h = 1e-1*r**2
#h = 0.005 # delka kroku
t = t + h
ax.scatter(u[0], u[2], marker=".")
k1 = f(u)
k2 = f(u+h/2*k1)
k3 = f(u+h/2*k2)
k4 = f(u+h*k3)
u=u+h/6*(k1+2*k2+2*k3+k4)
ax.set_xlabel('x')
ax.set_ylabel('y')
Text(0, 0.5, 'y')