Aproximace funkcí
Contents
5. Aproximace funkcí#
Naimportujeme si knihovny potřebné pro následující příklady:
import numpy as np
import matplotlib.pyplot as plt
5.1. Typy aproximací:#
Interpolační
Čebyševovy
Aproximace metodou nejmenších čtverců
5.2. Interpolační aproximace#
Máme zadané diskrétní funkční hodnoty nějaké funkce \(f(x)\) v bodech \(x_{0},\dots ,x_{n}\).
Hledáme interpolační funkci, která má v zadaných bodech \(x_{0},\dots ,x_{n}\) stejné hodnoty jako funkce \(f(x)\).
Globální interpolace
V celém intervalu jsou koeficienty interpolační funkce stejné
Např. Lagrangeův, Newtonův interpolační polynom
Lokální interpolace
V každém podintervalu má interpolační funkce různé koeficienty
Např. spline
5.2.1. Lagrangeův interpolační polynom (globální interpolace )#
Konstrukce Lagrangeova interpolačního polynomu řádu \(n\):
Známe \(n+1\) bodů \(x_{0},\dots ,x_{n}\) a jim odpovídající funkční hodnoty \(y_{0}=f(x_{0}),\dots ,y_{n}=f(x_{n})\) $\( L_{n}(x)=\sum_{i=0}^{n}y_{i}F_{i}(x), \)\( přičemž \)L_{n}(x_{0})=y_{0},\dots,L_{n}(x_{n})=y_{n},\( \)\( F_{i}(x) = \dfrac{x-x_{0}}{x_{i}-x_{0}}\dots\dfrac{x-x_{i-1}}{x_{i}-x_{i-1}}\dfrac{x-x_{i+1}}{x_{i}-x_{i+1}}\dots\dfrac{x-x_{n}}{x_{i}-x_{n}}=\prod_{j = 0,j \neq i}^{n}\dfrac{x-x_{j}}{x_{i}-x_{j}} \)$
#
bod = -0.5
x = np.array([-4, -1, 0, 2])
y = np.array([-28, -16, -36, -40])
pocet_bodu = np.size(x) # stupen polynomu je pocet_bodu - 1
L = 0 # Lagrangeuv polynom
for i in range(pocet_bodu): # pocet scitancu v sume = stejny jako pocet bodu
F = 1
for j in range(pocet_bodu):
if j != i:
F = F * (bod - x[j])/(x[i]-x[j])
L = L + y[i]*F
print(L)
-26.25
5.2.2. Spline (lokální interpolace)#
Lokální interpolace
Celý interval je rozdělený na podintervaly
V každém podintervalu má interpolační funkce různé koeficienty
Interpolační spline:
Prochází všemi uzly.
V uzlech má spojitou alespoň první derivaci.
Kubický spline - odvození
5.3. Aproximace Čebyševovými polynomy#
Čebyševův polynom \(T_{n}(x)\):
\(T_{0}(x)=1\)
\(T_{1}(x)=x\)
\(T_{n+1}(x)=2xT_{n}(x)-T_{n-1}(x)\)
Pro interpolaci Čebyševovými polynomy se libovolný interval lineárně transformuje na interval \(\langle-1,1\rangle\).
Každému \(t \in \langle a,b\rangle\) přiřadíme hodnotu \(x \in \langle-1,1\rangle\) předpisem \(x = \left[2t-(a+b)\right]/(b-a)\).
Funkci \(f(x)\) aproximujeme: $\( f(x)\approx T(x)=\dfrac{1}{2}c_{0}+\sum_{j=1}^{N-1}c_{j}T_{j}(x) \)\( \)\( c_{j}=\dfrac{2}{N}\sum_{k=1}^{N}f\left[ \cos\left( \dfrac{\pi(k-0.5)}{N}\right) \right]\cos\left( \dfrac{\pi j(k-0.5)}{N}\right) \)$
Hodnoty funkce \(f(x)\) jsou rovny hodnotám funkce \(T(x)\) ve všech \(N\) kořenech (nulových bodech) polynomu \(T_{n}(x)\).
{kind=link}
#
N = 20 # stupen aproximace (pocet Cebysevovych polynomu)
a = -10 # levy kraj intervalu
b = 10 # pravy kraj intervalu
def zadanafce(t):
return t**4 * np.log(10+np.abs(t)) * np.cos(t)
# t interval <a,b>
bodu = 1000 # pocet bodu, ze kterych chceme funkci aproximovat
# transformace intervalu z <a,b> do <-1,1>
def trans(t):
return ( 2*t - (a+b) ) / (b-a)
def func(xx): # hodnota funkce pro xx transformovane z <a,b> na <-1,1>
t = ( xx*(b-a) + (a+b) ) / 2 # "roztahneme" hodnoty z intervalu <-1,1> na <a,b>
return zadanafce(t)# aproximovana funkce
def c(j): # koeficienty cj (viz. prednaska)
suma = 0
for k in range(N):
suma = suma + func(np.cos(np.pi/N*(k-0.5)) ) * np.cos(np.pi/N*(k-0.5)*j )
return 2*suma/N
# rekurentni definice n Cebysevovych polynomu v bode xx
def T(xx): # Cebysevovy polynomy
T0 = 1
T = np.zeros(N-1)
T[1] = xx
T[2] = 2*xx*T[1] - T0
for ii in range(3,N-2):
T[ii] = 2*xx*T[ii-1] - T[ii-2]
return T
cj = np.zeros((N-1))
c0 = c(0)
for i in range(N-1):
cj[i] = c(i)
krok = (b-a) / bodu
x = a
xarr = np.zeros(bodu)
yarr = np.zeros(bodu)
for i in range(bodu):
Tj = T(trans(x)) # hodnoty Cebysevovych polynomu v bode x
y = 0.5*c0*1 # c0 prvni scitanec v aproximovane funkci
# dale potrebujeme pricist sumu polynomu
# cj[j] - koeficient cj, tj. j-ty polynom v bode x
for j in range(N-2):
y = y + cj[j]*Tj[j]
xarr[i] = x # ulozime aktualni x
yarr[i] = y # a aktualni y
x = x+krok # posuneme se na dalsi x
x1 = np.arange(a,b,krok)
y1= zadanafce(x1)
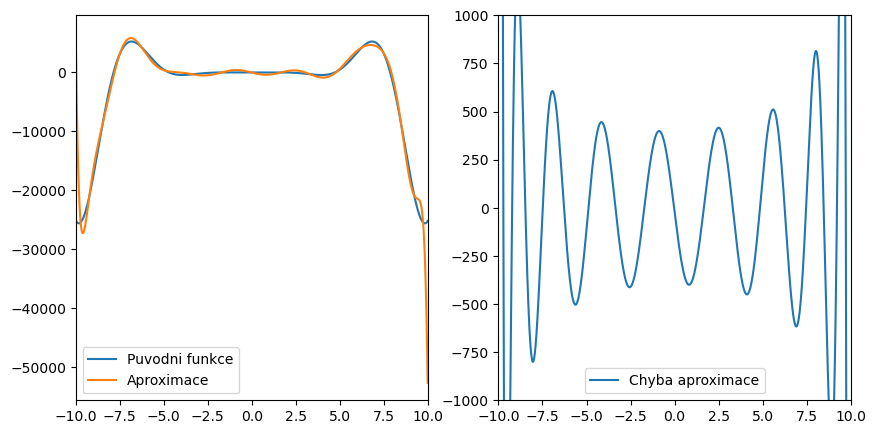
fig, ax = plt.subplots(1,2,figsize=(10,5))
ax[0].plot(x1,y1,label='Puvodni funkce')
ax[0].plot(xarr,yarr,label='Aproximace')
ax[0].set_xlim(-10,10)
ax[0].legend()
ax[1].plot(x1,yarr-y1,label='Chyba aproximace')
ax[1].set_xlim(-10,10)
ax[1].set_ylim(-1000,1000)
ax[1].legend()
<matplotlib.legend.Legend at 0x7ab77405a670>
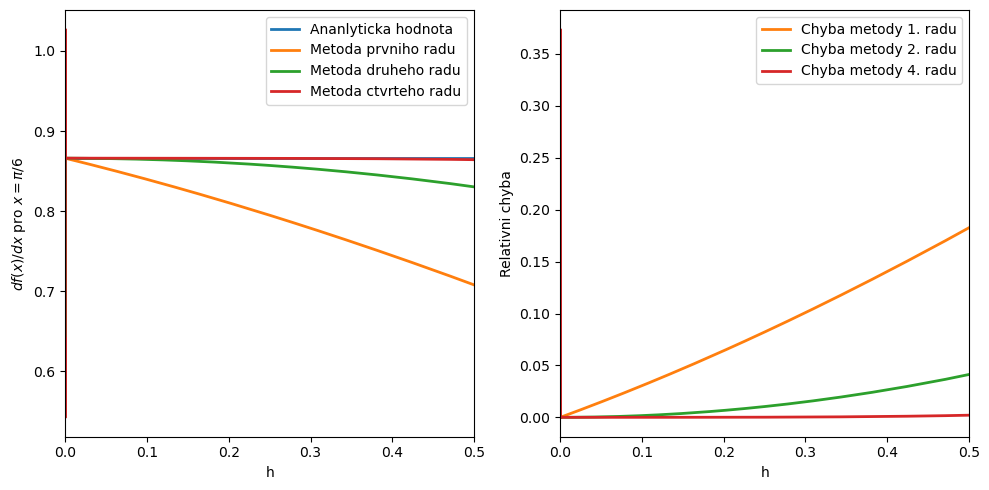
5.4. Aproximace derivací konečnými diferencemi#
Na 2. cvičení jsme ukazovali jednoduchý vzorec pro aproximaci derivace z funkčních hodnot ve dvou blízkých bodech
Ukážeme si příklad metody vyššího řádu pro přesnější aproximaci derivace.
# kod
import numpy as np
import matplotlib.pyplot as plt
def f(x):
return np.sin(x)
def df(x):
return np.cos(x)
def num1_df(x, h):
return (f(x+h) - f(x))/h
def num2_df(x, h):
return (f(x+h) - f(x-h))/(2*h)
def num4_df(x, h): # odhad derivace metodou ctvrteho radu
return 1/(12*h) * ( f(x-2*h) - 8*f(x-h) + 8*f(x+h) - f(x+2*h) )
x = np.pi/6
h = x # Pocatecni hodnota h
der_a = df(x) # Hodnota derivace analyticky
der_1 = num1_df(x,h) # Derivace metodou prvniho radu
der_2 = num2_df(x,h) # Derivace metodou druheho radu
der_4 = num4_df(x,h) # Derivace metodou ctvrteho radu
krok = h # Seznam pouzitych velikosti kroku
# Hledame hodnoty derivace v bode x v zavislosti na kroku h
while h > np.finfo(float).eps:
der_a = np.append(der_a, df(x))
der_1 = np.append(der_1, num1_df(x,h))
der_2 = np.append(der_2 ,num2_df(x,h))
der_4 = np.append(der_4 ,num4_df(x,h))
krok = np.append(krok, h)
h = 0.9 * h
fig, ax = plt.subplots(1,2,figsize=(10,5))
ax[0].plot(krok,der_a,linewidth=2,label='Ananlyticka hodnota')
ax[0].plot(krok,der_1,linewidth=2,label='Metoda prvniho radu')
ax[0].plot(krok,der_2,linewidth=2,label='Metoda druheho radu')
ax[0].plot(krok,der_4,linewidth=2,label='Metoda ctvrteho radu')
ax[0].set_xlabel('h')
ax[0].set_ylabel(r'$df(x)/dx$ pro $x=\pi/6$')
ax[0].set_xlim((0,0.5))
#ax[0].set_xscale('log')
ax[0].legend()
ax[1].plot(krok, np.abs((der_1-der_a)/der_a),c='C1',linewidth=2,label='Chyba metody 1. radu')
ax[1].plot(krok, np.abs((der_2-der_a)/der_a),color='C2',linewidth=2,label='Chyba metody 2. radu')
ax[1].plot(krok, np.abs((der_4-der_a)/der_a),color='C3',linewidth=2,label='Chyba metody 4. radu')
ax[1].set_xlabel('h')
ax[1].set_ylabel('Relativni chyba')
ax[1].set_xlim((0,0.5))
ax[1].legend()
fig.tight_layout()